
ロボット開発の取り組み
自社の技術力でロボットの未来を切り拓いていきます!
さがみロボット産業特区でもある相模原市に弊社はあります。自社の技術力を、もっと社会の未来に生かせないか…そんな思いから、ロボット技術の開発に取り組み始めました。相模原市ロボット導入モニター調査事業を活用した産業用ロボットのNUI遠隔操作システムの研究開発から始まり、現在は、従来の産業用ロボットよりも一歩進んだ活用方法として、インピーダンス制御を取り入れた人的作業の自動化ソリューションの研究開発に、社員で作業を分担しながら日々取り組んでいます!
代表のことば
近年、様々な会社がロボット開発に力を入れており、ロボット産業が著しく成長しています。今後、ますます発展が予想されるロボットの未来に期待し、協力していきたいという思いから、弊社も数年前からロボットの研究開発に取り組むこととなりました。現在では、自社が培ってきた大規模ソフトウェア開発技術を核に、ハードウェア制御技術、3次元データ処理技術に、インピーダンス制御技術などを取り入れて、産業用ロボットを活用した人的作業の自動化分野を中心へと取り組みが進んでいます。また、研究機関と積極的な連携も行うことで、今年からRTK測位を活用した屋外型自動走行ロボットの研究にも着手を始めました。
年々活用の幅が広がっているロボット技術は、従来のハードウェア中心の世界から、ソフトウェア主導のシステム開発へと変革しつつあります。今後は、システム開発会社だからこそ可能なロボットテクノロジーの関連分野に積極的に取り組むことで、メディア技術とロボット技術の融合という新しい分野へと邁進していきます。社員一同で作業を分担し1つの開発に取り組むことで、社内での意見交換も積極的に行われ活気付いてきていると感じます。まずは、このような弊社のロボットに関する取り組みを知っていただければ幸いです。
2019年9月24日 株式会社メディアロボテック代表 金沢 勇
ロボット関連システムの開発事例
自動走行ブラシ掛けロボット
事前にティーチングした経路に合わせて、自動走行しながらブラシ掛けをするロボットです。Kinectを使った障害物検知と床・壁の認識により、自動で障害物を避け、壁との距離により自己位置補正を行うRTMを使用して開発しました。

Human Support Robot実証実験
介護施設におけるHSR(トヨタ自動車製 Human Support Robot)の利用に関して実証実験するため、ROSを使用して来訪者の見送りをするアプリケーションを開発しました。
HSR社会実装の実証実験
HSR親しみやすいロボット開発

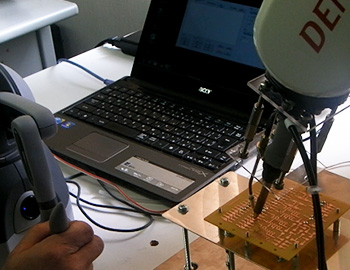
3次元入出力力覚デバイスによるロボットアームの遠隔操作
3次元入出力力覚デバイスを使って、リアルタイムにロボットアームを制御します。はんだ付けをする作業を例に実証試験により、0.1mm程度の精度で思ったように操作可能であることを検証しました。
はんだ付けロボットについて
力制御ロボット(KUKA iiwa)によるメモリ交換システム
PCのマザーボードへのメモリの交換作業を、インピーダンス制御を使用して実行します。~1mm程度の取り付け位置の誤差があっても、インピーダンス制御により自動で位置合わせを行って交換可能です。
技術解説PDFはこちらから【別ウィンドウ】
「さがみはらロボット導入支援センター」展示中【外部サイト】

エアマイクロ自動内径測定システム
ロボットアームを使用してエアマイクロ内径測定器の自動測定を可能としたシステムです。(メカトロテックジャパン2019・2019国際ロボット展に出展)
弊社ではエンドエフェクターとコントロールソフトウェアをセットで開発いたしますので、お手持ちのロボットアームに合わせて手軽に検品自動化が導入できます。

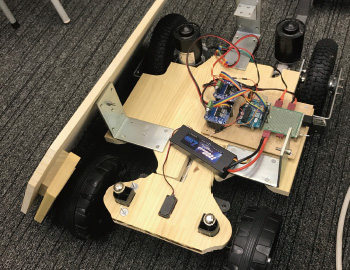
RTK測位を活用した屋外型自動走行ロボット
RTK測位を活用して±2㎝以内の高精度で自動走行を行うための屋外型ロボットです。東京都立大学久保田研究室と共同研究中。(さがみはらロボット大学校・2019国際ロボット展に出展)
建築現場における測量向け応用システムとして、RTK測位ARナビゲーションシステム(CAD図面を元に指定位置へカメラ画像上に目標方向を表示してナビします)も現在開発中。屋外の自動巡回向けロボットシステムや、屋外における案内システムなどのニーズをお持ちの方には、ベースシステムを安価にご提供できますので、お気軽にご相談ください。
技術解説PDFはこちらから【別ウィンドウ】
RTK測位ARナビゲーションシステム屋外実験の様子
